Những điều cần biết về Động cơ bước
1. Động cơ bước
2. Nguyên lý hoạt động của động cơ bước
3. Phân loại động cơ bước
4. Thông số động cơ bước
5. Các đặc tính cơ bản cần nhớ của động cơ bước
6. Ứng dụng của của Step Motor
7. Ưu nhược điểm của động cơ bước
1. Động cơ bước
Động cơ bước hay còn gọi là Step Motor là một loại động cơ chạy bằng điện có nguyên lý và ứng dụng khác biệt với đa số các động cơ điện thông thường. Chúng thực chất là một động cơ đồng bộ dùng để biến đổi các tín hiệu điều khiển dưới dạng các xung điện rời rạc kế tiếp nhau thành các chuyển động góc quay hoặc các chuyển động của rôto có khả năng cố định roto vào các vị trí cần thiết.

Step Motor làm việc được là nhờ có bộ chuyển mạch điện tử đưa các tín hiệu điều khiển vào stato theo một thứ tự và một tần số nhất định. Tổng số góc quay của roto tương ứng với số lần chuyển mạch, cũng như chiều quay và tốc độ quay của roto, phụ thuộc vào thứ tự chuyển đổi và tần số chuyển đổi. Khi một xung điện áp đặt vào cuộn dây stato (phần ứng) của động cơ bước thì roto (phần cảm) của động cơ sẽ quay đi một góc nhất định, góc ấy là một bước quay của động cơ. Khi các xung điện áp đặt vào các cuộn dây phần ứng thay đổi liên tục thì roto sẽ quay liên tục (Nhưng thực chất chuyển động đó vẫn là theo các bước rời rạc).
2. Nguyên lý hoạt động của động cơ bước
Stepper Motor không quay theo cơ chế thông thường, chúng quay theo từng bước nên có độ chính xác rất cao về mặt điều khiển học. Chúng làm việc nhờ các bộ chuyển mạch điện tử đưa các tín hiệu điều khiển vào stato theo thứ tự và một tần số nhất định. Tổng số góc quay của rôto tương ứng với số lần chuyển mạch, cũng như chiều quay và tốc độ quay của rôto phụ thuộc vào thứ tự chuyển đổi và tần số chuyển đổi.
Điều khiển full-step (wave drive – 1 phase on)
Cách điều khiển này đơn giản, nhưng công suất rất thấp, chỉ đạt 25% đối với Step Motor kiểu unipolar, và 50% đối với kiểu bipolar. Do đó lực xoắn xinh ra bởi dạng điều khiển này tương đối yếu.
Điều khiển full-step (two phase drive – 2 phase on)
Trong chế độ này, hai cuộn dây sẽ được cấp năng lượng đồng thời, cho công suất cao hơn dạng ở trên.
Điều khiển half-step (1 or 2 phase on)
Loại điều khiển này kết hợp hai dạng trên lại. kết quả là Step Motor có thể di chuyển ở các góc có độ phân giải gấp 2 lần kiểu ở trên.
Điều khiển chạy bước nhỏ (MicroStepping Drive)
Ưu điểm của phương pháp điều khiển chạy bước nhỏ đó là tính xác thực cao nên nó được dùng phổ thông nhất. Nó giúp tăng độ chính xác với từng bước và giảm được một phần tiếng ồn khi hoạt động tạo tiếng to.
Mạch sẽ cung cấp dòng bước biến đổi để cuộn dây Stator có thể tồn tại dưới dạng hình sin.
Đây là phương pháp mới và chỉ dùng cho stepper motor. Nó cho phép động cơ dừng lại và định vị trong 1 nửa bước chính, giữa hai bước đủ.
Stepper Motor không quay theo cơ chế thông thường, chúng quay theo từng bước nên có độ chính xác rất cao về mặt điều khiển học. Chúng làm việc nhờ các bộ chuyển mạch điện tử đưa các tín hiệu điều khiển vào stato theo thứ tự và một tần số nhất định. Tổng số góc quay của rôto tương ứng với số lần chuyển mạch, cũng như chiều quay và tốc độ quay của rôto phụ thuộc vào thứ tự chuyển đổi và tần số chuyển đổi.
Điều khiển full-step (wave drive – 1 phase on)
Cách điều khiển này đơn giản, nhưng công suất rất thấp, chỉ đạt 25% đối với Step Motor kiểu unipolar, và 50% đối với kiểu bipolar. Do đó lực xoắn xinh ra bởi dạng điều khiển này tương đối yếu.
Điều khiển full-step (two phase drive – 2 phase on)
Trong chế độ này, hai cuộn dây sẽ được cấp năng lượng đồng thời, cho công suất cao hơn dạng ở trên.
Điều khiển half-step (1 or 2 phase on)
Loại điều khiển này kết hợp hai dạng trên lại. kết quả là Step Motor có thể di chuyển ở các góc có độ phân giải gấp 2 lần kiểu ở trên.
Điều khiển chạy bước nhỏ (MicroStepping Drive)
Ưu điểm của phương pháp điều khiển chạy bước nhỏ đó là tính xác thực cao nên nó được dùng phổ thông nhất. Nó giúp tăng độ chính xác với từng bước và giảm được một phần tiếng ồn khi hoạt động tạo tiếng to.
Mạch sẽ cung cấp dòng bước biến đổi để cuộn dây Stator có thể tồn tại dưới dạng hình sin.
Đây là phương pháp mới và chỉ dùng cho stepper motor. Nó cho phép động cơ dừng lại và định vị trong 1 nửa bước chính, giữa hai bước đủ.
3. Phân loại động cơ bước
1. Phân loại theo rotor của động cơ bước
Loại 1: Stepper Motor có rotor được tác động bằng dây quấn hoặc nam châm vĩnh cữu.
Loại 2: Stepper Motor có rotor không được tác động nhưng có phần từ cảm ứng, phản kháng – còn gọi là động cơ bước thay đổi từ trở.
Loại 3: Stepper Motor có cấu tạo rotor kết hợp cả 2 loại trên.
Sẽ rất quen thuộc khi các bạn được giới thiệu rằng: Stepper Motor được chia làm 2 loại, đó là loại động cơ bước nam châm vĩnh cửu và loại động cơ bước biến từ trở (hoặc kết hợp cả hai gọi là loại động cơ bước hỗn hợp).
2. Phân loại theo cực của động cơ bước
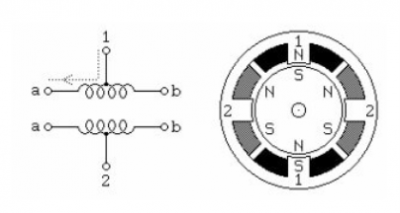
Loại 1: Stepper Motor đơn cực, có thể bao gồm cả động cơ bước loại nam châm vĩnh cửu hoặc động cơ bước loại hỗn hợp. Nhưng ở các cuộn dây luôn có đầu trung tâm được nối ra từ chính giữa mỗi cuộn dây.
1. Phân loại theo rotor của động cơ bước
Loại 1: Stepper Motor có rotor được tác động bằng dây quấn hoặc nam châm vĩnh cữu.
Loại 2: Stepper Motor có rotor không được tác động nhưng có phần từ cảm ứng, phản kháng – còn gọi là động cơ bước thay đổi từ trở.
Loại 3: Stepper Motor có cấu tạo rotor kết hợp cả 2 loại trên.
Sẽ rất quen thuộc khi các bạn được giới thiệu rằng: Stepper Motor được chia làm 2 loại, đó là loại động cơ bước nam châm vĩnh cửu và loại động cơ bước biến từ trở (hoặc kết hợp cả hai gọi là loại động cơ bước hỗn hợp).
2. Phân loại theo cực của động cơ bước
Loại 1: Stepper Motor đơn cực, có thể bao gồm cả động cơ bước loại nam châm vĩnh cửu hoặc động cơ bước loại hỗn hợp. Nhưng ở các cuộn dây luôn có đầu trung tâm được nối ra từ chính giữa mỗi cuộn dây.
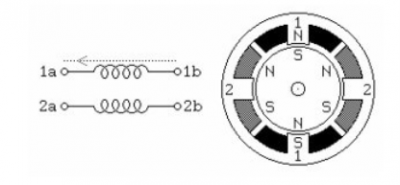
Loại 2: Stepper Motor lưỡng cực, có thể bao gồm cả động cơ bước loại nam châm vĩnh cửu hoặc động cơ bước loại biến từ trở. Nhưng ở các cuộn dây sẽ không có đầu dây nối ra từ trung tâm.
3. Phân loại theo số pha của động cơ bước
Loại 1: Step Motor 2 pha, là loại động cơ bước 4 dây, 6 dây hoặc 8 dây.
Loại 2: Step Motor 3 pha, là loại động cơ bước 3 dây hoặc 4 dây.
Loại 3: Step Motor 5 pha, là loại động cơ bước có 5 dây hoặc 10 dây.
Loại 1: Step Motor 2 pha, là loại động cơ bước 4 dây, 6 dây hoặc 8 dây.
Loại 2: Step Motor 3 pha, là loại động cơ bước 3 dây hoặc 4 dây.
Loại 3: Step Motor 5 pha, là loại động cơ bước có 5 dây hoặc 10 dây.
4. Thông số động cơ bước
Điều đầu tiên khi tìm kiếm motor bước đó là xác định được số step. Thông số này sẽ được các nhà sản xuất cung cấp một cách đầy đủ. Thường thì tại Việt Nam dùng các motor bước có số stepp 200.
Một thông số khác mà chúng ta cần quan tâm liên quan đến điện áp đó là:
+ Rated Current / phase (dòng tiêu thụ tối đa của mỗi pha): 2.0 A
+ Phase Resistance (điện trở của từng pha): 1.4 Ω
+ Voltage (hiệu điện thế dòng điện): 2.8 V
Tham số dòng tiêu thụ tối đa của mỗi pha (Rated Current/ phase) thể hiện cho bạn biết dòng điện tối đa mà mỗi pha của động cơ có thể nhận được.
Điện trở mỗi pha chính là hằng số. Cuối cùng thì con số hiệu điện thế dòng điện (voltage) là hiệu điện thế tối ưu có nhiệm vụ làm cho stepper hoạt động ổn định.
Điều đầu tiên khi tìm kiếm motor bước đó là xác định được số step. Thông số này sẽ được các nhà sản xuất cung cấp một cách đầy đủ. Thường thì tại Việt Nam dùng các motor bước có số stepp 200.
Một thông số khác mà chúng ta cần quan tâm liên quan đến điện áp đó là:
+ Rated Current / phase (dòng tiêu thụ tối đa của mỗi pha): 2.0 A
+ Phase Resistance (điện trở của từng pha): 1.4 Ω
+ Voltage (hiệu điện thế dòng điện): 2.8 V
Tham số dòng tiêu thụ tối đa của mỗi pha (Rated Current/ phase) thể hiện cho bạn biết dòng điện tối đa mà mỗi pha của động cơ có thể nhận được.
Điện trở mỗi pha chính là hằng số. Cuối cùng thì con số hiệu điện thế dòng điện (voltage) là hiệu điện thế tối ưu có nhiệm vụ làm cho stepper hoạt động ổn định.
5. Các đặc tính cơ bản cần nhớ của động cơ bước
Đặc tính động của động cơ bước
Đặc tính tốc độ – mô men: Đặc tính này được xác định bởi động cơ cùng với bộ điều khiển, và nó cũng bị ảnh hưởng rất nhiều bởi loại thiết bị điều khiển mà bạn sử dụng.
Đặc tính tải theo quán tính và tần số bắt đầu: Điều này cho thấy tần số khởi động cho phép của động cơ sẽ giảm khi tải quán tính của nó tăng lên. Các giá trị này còn được thay đổi theo tốc độ xung, nhưng động cơ bước vẫn không thể tuân theo tốc độ xung nếu nó vượt quá một điểm nhất định, vì như vậy sẽ dẫn đến việc đi sai bước.
Đặc tính có độ rung: Khi điều khiển vi bước step motor, động cơ bước quay nhưng trên thực tế là thực hiện rất nhiều bước có phản hồi, mỗi bước còn được mô tả bởi các giai đoạn cụ thể, chi tiết.
Đặc tính tĩnh của động cơ bước
Đặc tính mômen và góc: Khi điều khiển step motor, mối quan hệ giữa mức độ dịch chuyển góc của rôto và mômen sẽ tạo ra lực tác dụng lên trục động cơ, trong khi đó, động cơ còn được kích thích bởi một dòng điện định mức.
Độ chính xác của góc: Trong điều kiện động cơ chạy không tải, nó sẽ có độ chính xác của góc trong vào khoảng 0,05˚. Độ chính xác góc của động cơ bước thông thường được biểu thị bằng độ chính xác của vị trí dừng.
Độ chính xác của vị trí dừng: điều này thể hiện sự khác biệt giữa vị trí dừng động cơ theo mong muốn và vị trí dừng theo thực tế.
Trong điều kiện thực tế của mạch điều khiển động cơ bước 6 dây, động cơ bước luôn tồn tại ma sát. Nếu tải trọng của ma sát không đổi thì góc dịch chuyển sẽ không đổi đối với tất cả mọi hoạt động một chiều. Tuy nhiên, trong khi hoạt động hai chiều, sai số góc có thể tăng lên gấp đôi.
Đặc tính động của động cơ bước
Đặc tính tốc độ – mô men: Đặc tính này được xác định bởi động cơ cùng với bộ điều khiển, và nó cũng bị ảnh hưởng rất nhiều bởi loại thiết bị điều khiển mà bạn sử dụng.
Đặc tính tải theo quán tính và tần số bắt đầu: Điều này cho thấy tần số khởi động cho phép của động cơ sẽ giảm khi tải quán tính của nó tăng lên. Các giá trị này còn được thay đổi theo tốc độ xung, nhưng động cơ bước vẫn không thể tuân theo tốc độ xung nếu nó vượt quá một điểm nhất định, vì như vậy sẽ dẫn đến việc đi sai bước.
Đặc tính có độ rung: Khi điều khiển vi bước step motor, động cơ bước quay nhưng trên thực tế là thực hiện rất nhiều bước có phản hồi, mỗi bước còn được mô tả bởi các giai đoạn cụ thể, chi tiết.
Đặc tính tĩnh của động cơ bước
Đặc tính mômen và góc: Khi điều khiển step motor, mối quan hệ giữa mức độ dịch chuyển góc của rôto và mômen sẽ tạo ra lực tác dụng lên trục động cơ, trong khi đó, động cơ còn được kích thích bởi một dòng điện định mức.
Độ chính xác của góc: Trong điều kiện động cơ chạy không tải, nó sẽ có độ chính xác của góc trong vào khoảng 0,05˚. Độ chính xác góc của động cơ bước thông thường được biểu thị bằng độ chính xác của vị trí dừng.
Độ chính xác của vị trí dừng: điều này thể hiện sự khác biệt giữa vị trí dừng động cơ theo mong muốn và vị trí dừng theo thực tế.
Trong điều kiện thực tế của mạch điều khiển động cơ bước 6 dây, động cơ bước luôn tồn tại ma sát. Nếu tải trọng của ma sát không đổi thì góc dịch chuyển sẽ không đổi đối với tất cả mọi hoạt động một chiều. Tuy nhiên, trong khi hoạt động hai chiều, sai số góc có thể tăng lên gấp đôi.
6. Ứng dụng của của Step Motor
Động cơ bước hiện nay đã và đang được ứng dụng rất nhiều và ngày càng phổ biến, chủ yếu là trong điều khiển chuyển động kỹ thuật số của các động cơ. Nó được thực hiện bởi các lệnh đã được mã hoá tự động dưới dạng số.
Ứng dụng động cơ bước trong ngành công nghiệp tự động hoá, đặc biệt là đối với các thiết bị máy móc cần phải có sự chính xác. Chẳng hạn như các loại máy móc công nghiệp hiện đại, giúp phục vụ cho quá trình gia công cơ khí như: Máy cắt công nghệ plasma CNC, máy cắt công nghệ CNC laser,…
Ngoài ra, trong lĩnh vực công nghệ máy tính, động cơ bước Step cũng được sử dụng trong các loại ổ đĩa cứng hoặc ổ đĩa mềm, thậm chí là cả máy in,…
Trong lĩnh vực an ninh bảo mật, động cơ bước chính là một sản phẩm giám sát mới, đem lại tiến bộ vượt trội cho ngành an ninh.
Trong lĩnh vực tế, động cơ bước được sử dụng để sản xuất máy quét y tế, máy lấy mẫu, thậm chí còn có bên trong máy chụp ảnh nha khoa kỹ thuật số, những chiếc bơm chất lỏng, mặt nạ phòng độc và các loại máy móc phân tích mẫu máu.
Động cơ bước hiện nay đã và đang được ứng dụng rất nhiều và ngày càng phổ biến, chủ yếu là trong điều khiển chuyển động kỹ thuật số của các động cơ. Nó được thực hiện bởi các lệnh đã được mã hoá tự động dưới dạng số.
Ứng dụng động cơ bước trong ngành công nghiệp tự động hoá, đặc biệt là đối với các thiết bị máy móc cần phải có sự chính xác. Chẳng hạn như các loại máy móc công nghiệp hiện đại, giúp phục vụ cho quá trình gia công cơ khí như: Máy cắt công nghệ plasma CNC, máy cắt công nghệ CNC laser,…
Ngoài ra, trong lĩnh vực công nghệ máy tính, động cơ bước Step cũng được sử dụng trong các loại ổ đĩa cứng hoặc ổ đĩa mềm, thậm chí là cả máy in,…
Trong lĩnh vực an ninh bảo mật, động cơ bước chính là một sản phẩm giám sát mới, đem lại tiến bộ vượt trội cho ngành an ninh.
Trong lĩnh vực tế, động cơ bước được sử dụng để sản xuất máy quét y tế, máy lấy mẫu, thậm chí còn có bên trong máy chụp ảnh nha khoa kỹ thuật số, những chiếc bơm chất lỏng, mặt nạ phòng độc và các loại máy móc phân tích mẫu máu.
7. Ưu nhược điểm của động cơ bước
Ưu điểm của động cơ bước
- Không chổi than
Không xảy ra hiện tượng đánh lửa chổi than làm tổn hao năng lượng, tại một số môi trường đặc biệt (hầm lò…) có thể gây nguy hiểm.
- Tạo được mômen giữ
Một vấn đề khó trong điều khiển là điều khiển động cơ ở tốc độ thấp mà vẫn giữ được mômen tải lớn. Động cơ bước là thiết bị làm việc tốt trong vùng tốc độ nhỏ. Nó có thể giữ được mômen thậm chí cả vị trí nhừ vào tác dụng hãm lại của từ trường rotor.
- Điều khiển vị trí theo vòng hở
Một lợi thế rất lớn của động cơ bước là ta có thể điều chỉnh vị trí quay của roto theo ý muốn mà không cần đến phản hồi vị trí như các động cơ khác, không phải dùng đến encoder hay máy phát tốc (khác với servo).
- Độc lập với tải
Với các loại động cơ khác, đặc tính của tải rất ảnh hưởng tới chất lượng điều khiển. Với động cơ bước, tốc độ quay của rotor không phụ thuộc vào tải (khi vẫn nằm trong vùng momen có thể kéo được). Khi momen tải quá lớn gây ra hiện tượng trượt, do đó không thể kiểm soát được góc quay..
Nhược điểm.
- Step Motor hay xảy ra có hiện tượng bị trượt bước. Lí do bởi vì lực từ yếu hay nguồn điện cấp vào không đủ.
- Khi hoạt động thì Step Motor thường gây ra tiếng ồn và có hiện tượng nóng dần. Với những Step Motor thế hệ mới thì việc độ ồn và nóng của động cơ giảm đáng kể.
Ưu điểm của động cơ bước
- Không chổi than
Không xảy ra hiện tượng đánh lửa chổi than làm tổn hao năng lượng, tại một số môi trường đặc biệt (hầm lò…) có thể gây nguy hiểm.
- Tạo được mômen giữ
Một vấn đề khó trong điều khiển là điều khiển động cơ ở tốc độ thấp mà vẫn giữ được mômen tải lớn. Động cơ bước là thiết bị làm việc tốt trong vùng tốc độ nhỏ. Nó có thể giữ được mômen thậm chí cả vị trí nhừ vào tác dụng hãm lại của từ trường rotor.
- Điều khiển vị trí theo vòng hở
Một lợi thế rất lớn của động cơ bước là ta có thể điều chỉnh vị trí quay của roto theo ý muốn mà không cần đến phản hồi vị trí như các động cơ khác, không phải dùng đến encoder hay máy phát tốc (khác với servo).
- Độc lập với tải
Với các loại động cơ khác, đặc tính của tải rất ảnh hưởng tới chất lượng điều khiển. Với động cơ bước, tốc độ quay của rotor không phụ thuộc vào tải (khi vẫn nằm trong vùng momen có thể kéo được). Khi momen tải quá lớn gây ra hiện tượng trượt, do đó không thể kiểm soát được góc quay..
Nhược điểm.
- Step Motor hay xảy ra có hiện tượng bị trượt bước. Lí do bởi vì lực từ yếu hay nguồn điện cấp vào không đủ.
- Khi hoạt động thì Step Motor thường gây ra tiếng ồn và có hiện tượng nóng dần. Với những Step Motor thế hệ mới thì việc độ ồn và nóng của động cơ giảm đáng kể.